製品情報
3D安全センサー
AcroSensor(アクロセンサー)
製品概要/活用事例
製品特徴
-
POINT 1 人を空間的に監視
ロボット停止領域(安全距離)を短縮することができる
通常運転できる領域が増える
人の胴体ではなく、手先を3D で検知することで、レーザースキャナー使用時よりもロボット停止領域を狭くすることができます。これにより、チョコ停が減ってロボットの稼働率が上がり、生産性を向上させることができます。

-
POINT 2 人の動きを監視
接近を検出することができる
人の動きに応じた効率的な制御
ミリ波レーダーを用いた独自の探知アルゴリズムにより、検出物の速度を検知することができます。これにより、より効率的なロボット制御が可能となります。

検出物を距離で検出する「距離モード」
人の接近を検知させてロボットを停止させる場合、停止させる距離を設定する必要があります。
AcroSensorではこの距離を安全距離と表現していますが、ISO13855で計算方法が規定されています。
※ISO13855では最小距離と表記されているが、本説明では安全距離と表現。
S = K ×(T1+T2)+ C + A
S:安全距離(mm)
K:人の接近速度(mm/s)
T1:ロボットシステムの最大停止時間(s)
T2:センサーの応答時間(s)
C:安全領域に侵入する前に身体の一部が接近する距離(mm)
A:センサーの追加安全距離(mm)

安全距離の計算例
| S (mm) |
K (mm/s) |
T1 (s) |
T2 (s) |
C (mm) |
A (mm) |
|
|---|---|---|---|---|---|---|
| 胴体 | 1523 | 1600 | 0.2 | 0.158 | 850 | 100 |
| 拳 | 803 | 1600 | 0.2 | 0.158 | 130 | 100 |

検出物を距離と速度で検出する「距離速度モード」
ISO13855では、安全担保を「距離」と規定していますが、「速度」の概念は含まれておりません。
そのため、規格上は安全距離として設定することになります。
現在、距離以外に速度を検出できるセンサーの規格は存在していません。
このモードは、安全距離に人の動きを加味して、効率的なロボット制御が可能になり、生産性が向上できます。
ただし、ユーザー様責任のもと、実施して頂くことになります。
-
距離モード→検出した「距離」でロボットを制御
-
距離速度モード→検出した「時間」でロボットを制御
※衝突までの時間によって減速/停止させる
安全距離 = 1000mm
接近速度 = 2000mm/s
↓
衝突時間 = 0.5s
衝突までの時間を基準とします



人の動きが遅くなる → 安全距離が短くなる
| ロボット速度 | 衝突時間T(s) |
|---|---|
| 0% | T≦0.5 |
| 50% | 0.5<T≦1.0 |
| 100% | T>1.0 |
衝突時間に対するロボット速度(オーバーライド値)を決めます。
| 安全距離 [mm] | |||||
|---|---|---|---|---|---|
| 0-500 | -1000 | -1500 | -2000 | ||
| 接近距離 [mm/s] |
-0 | 50% | 100% | 100% | 100% |
| -500 | 50% | 100% | 100% | 100% | |
| -1000 | 0% | 50% | 100% | 100% | |
| -1500 | 0% | 50% | 50% | 100% | |
| -2000 | 0% | 0% | 50% | 50% | |
安全距離と接近距離のマトリクス表に当てはめて、
ロボット速度を設定し、OSSD出力とします。
速度や向きを検出し、動きを把握できます。

効率的な制御 ⇒ 生産性が向上
代表的な使い方
基本的な検出

四角形状検出

180度検出

代表的な用途
接近検知

侵入検知

耐環境性
粉塵に影響されない

砕石工場で運用試験
水、ミスト、煙に影響されない

IP65試験をクリア
外乱光に影響されない

太陽光や照明の影響を受けない
製品仕様
| 検出 | 方式 | レーダー(電波) 周波数:60GHz |
|---|---|---|
| 計測範囲 | 距離:400~2000mm(手拳は600~900mm) 速度:-1920(離反)~2016mm/s(接近) 角度:水平±45° 垂直±15° |
|
| モード(選択) | ①距離・速度 | OSSDによる5段階出力 |
| ②距離 | ||
| 外部通信 | 安全出力 | OSSD:4本×2系統(制御指令) RUN:1本×2系統(故障通知) 出力仕様:PNP |
| PC設定ツール | USB2.0(micro-Bタイプ)※ケーブルは別途購入 | |
| 各種規格 | 安全機器 | IEC61496-1 タイプ3 取得 |
| 機能安全 | IEC62061 SIL2 取得 | |
| 電波法 | 技術基準適合(日本国内のみ) | |
| 保護等級 | IP65 | |
| 電源 | 供給電源 | DC24V |
| 消費電力 | 最大7W | |
| 寸法(W×H×D) | 94mm×82mm×43mm | |
| 重量 | 330g | |
I/F信号

設定ツール

外形寸法図

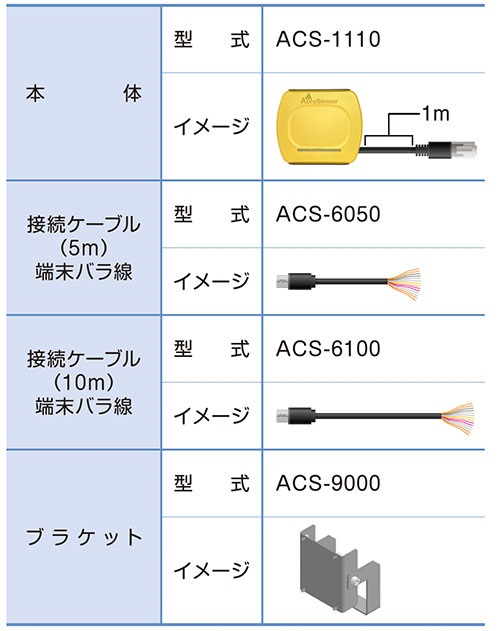
型式
活用ケース
協働ロボット
ロボット停止領域を含めたモジュール占有面積を削減
- 移動先の自由度が広がる
- チョコ停が削減でき、生産性が向上する

-
積載検知

-
駅ホーム居残り検知

-
エレベータ挟み込み監視
